Ah, the parallel park. For many drivers, it’s the automotive equivalent of a tightrope walk – a maneuver demanding precision, spatial awareness, and often, a silent prayer. But what if that stress could simply vanish? Enter the age of self-parking cars, vehicles that perform this tricky feat with apparent effortless grace. How exactly do they pull it off? Is it some kind of automotive telekinesis? As our short explainer video puts it, it’s less wizardry and definitely more high-tech smarts.
Speaking of quick explainers, sometimes seeing the tech in action, or at least having it broken down visually and audibly, helps park the concept firmly in your mind. If the idea of a car slotting itself neatly into a street-side space intrigues you, take a moment to check out this quick rundown:
As the video hints, the process is a fascinating blend of sensing the environment, processing the data, and executing precise movements. Let’s peel back the layers on this automated dance.
Table of Contents
The Scouting Mission: How the Car ‘Sees’ Potential Spots
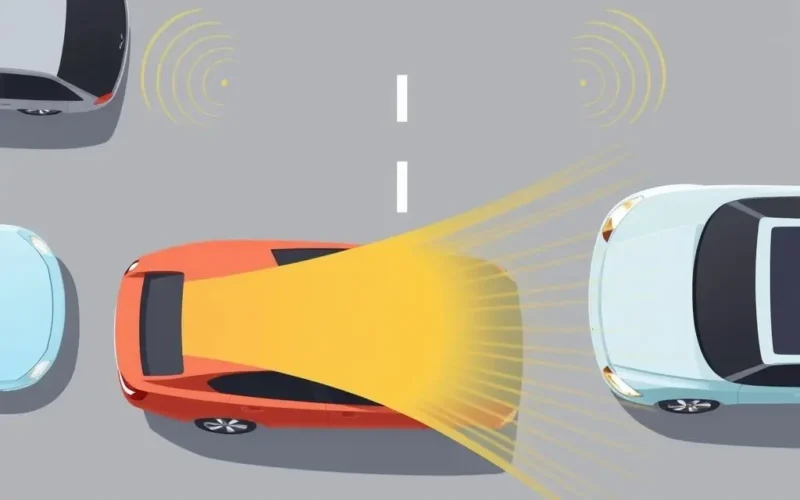
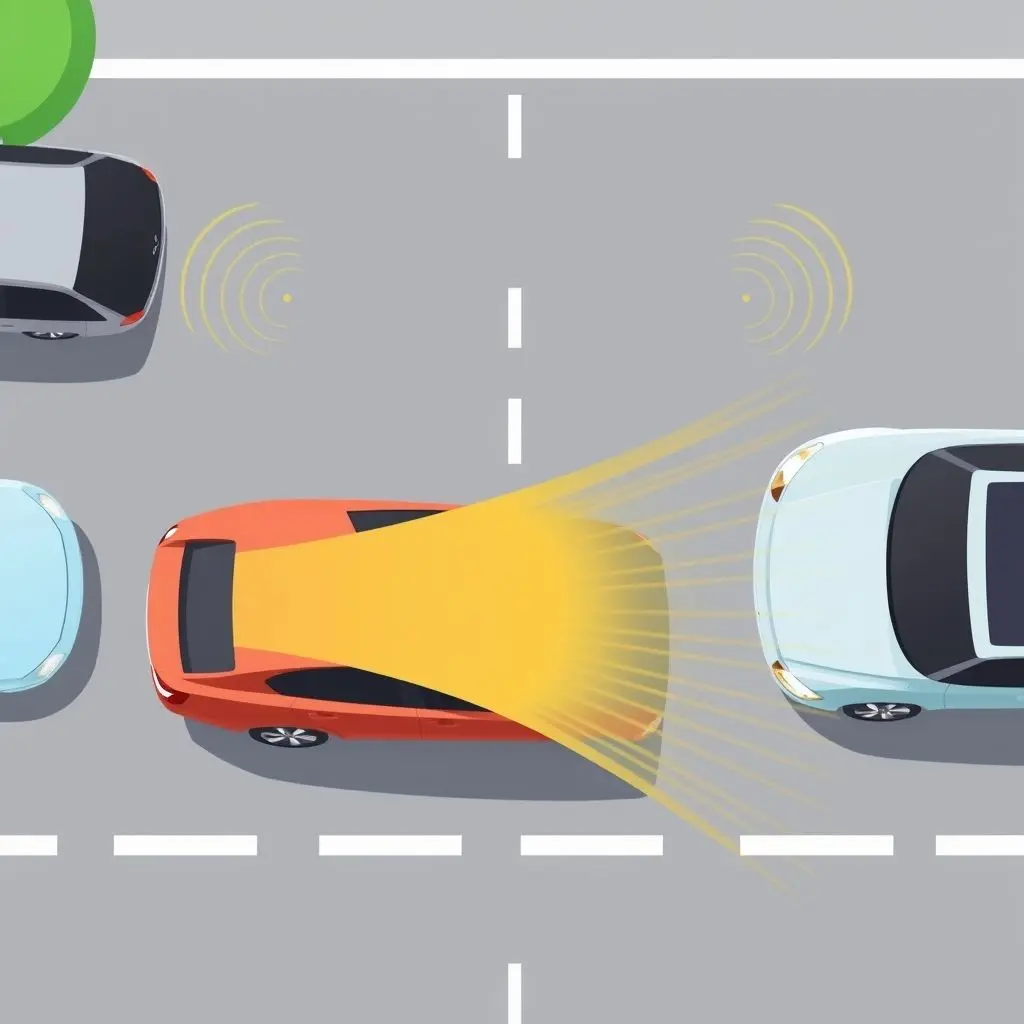
Before a self-parking car can even *think* about sliding into a spot, it needs to find one. This isn’t done by hope or guesswork. It relies on a suite of dedicated sensors, most commonly ultrasonic sensors. You’ve likely seen the small, circular dots integrated into the bumpers or sides of modern cars? Those are often ultrasonic sensors, acting like tiny bats emitting high-frequency sound waves.
As you drive slowly along a street or parking lot aisle, these sensors are constantly firing pulses and listening for the echo. By measuring the time it takes for the sound wave to return after bouncing off an object (like another car, a curb, or a wall), the car’s system can calculate the distance to that object. By combining data from multiple sensors along the sides of the vehicle, the system builds a dynamic map of the surrounding environment.
When the car passes a gap between two parked vehicles, the sensors measure the length of that gap, its depth (distance from the car), and identify potential obstacles like hydrants, poles, or even oddly parked bikes. The car’s computer is simultaneously processing this incoming stream of data, evaluating if the detected space is large enough for the vehicle’s dimensions plus a necessary safety margin.
More advanced systems might also integrate data from cameras and radar sensors, providing even richer detail about the environment, identifying lines on the road, or detecting moving objects, but ultrasonic sensors are typically the core technology for initial space measurement in many self-parking systems.
The Brains of the Operation: Processing the Data and Planning the Path
Once a suitable parking space is identified and confirmed by the driver (usually via a prompt on the infotainment screen), the real computational heavy lifting begins. All the data gathered by the sensors – the precise dimensions of the spot, the car’s current position relative to it, the angle of the curb, the location of obstacles – is fed into the car’s central processing unit, often a dedicated module or integrated within the main Engine Control Unit (ECU).
Sophisticated algorithms then take over. These aren’t just simple ‘turn the wheel’ commands; they are complex mathematical models that calculate the optimal trajectory – the perfect curved path – required for the car to maneuver smoothly and safely into the designated spot. The algorithms consider the car’s specific dimensions (length, width, turning radius), the required clearance, and the target final position and orientation.
Think of it like a highly advanced geometry problem solved in real-time. The system determines the necessary sequence of steering wheel angles, forward and reverse movements, and speed adjustments needed to follow that ideal path. It predicts where the car will be at each step of the maneuver and constantly compares that prediction to the actual sensor data, making tiny adjustments as needed.
This processing happens instantly, allowing the system to react dynamically. If a new obstacle is detected (perhaps a pedestrian or cyclist unexpectedly moves behind the car), the system can pause or adjust the maneuver accordingly. The speed of processing and the complexity of these algorithms are what make the seamless execution possible.
Execution: The Automated Dance into the Spot
With the plan formulated, the system then takes control of the car’s actuators – the components that physically control movement. The primary control is usually the steering system. Modern cars with electric power steering (EPS) allow the car’s computer to directly control the steering wheel angle with incredible precision, turning it faster or slower and to exact degrees as dictated by the calculated path.
In many systems, the car also manages the speed, controlling the accelerator and brake. Some systems require the driver to control the speed (pressing the gas and brake pedals as instructed), while others are fully automated, handling throttle and braking themselves based on sensor feedback and the planned trajectory. The key is the integration: the steering, speed, and brake inputs are coordinated perfectly according to the algorithm’s plan.
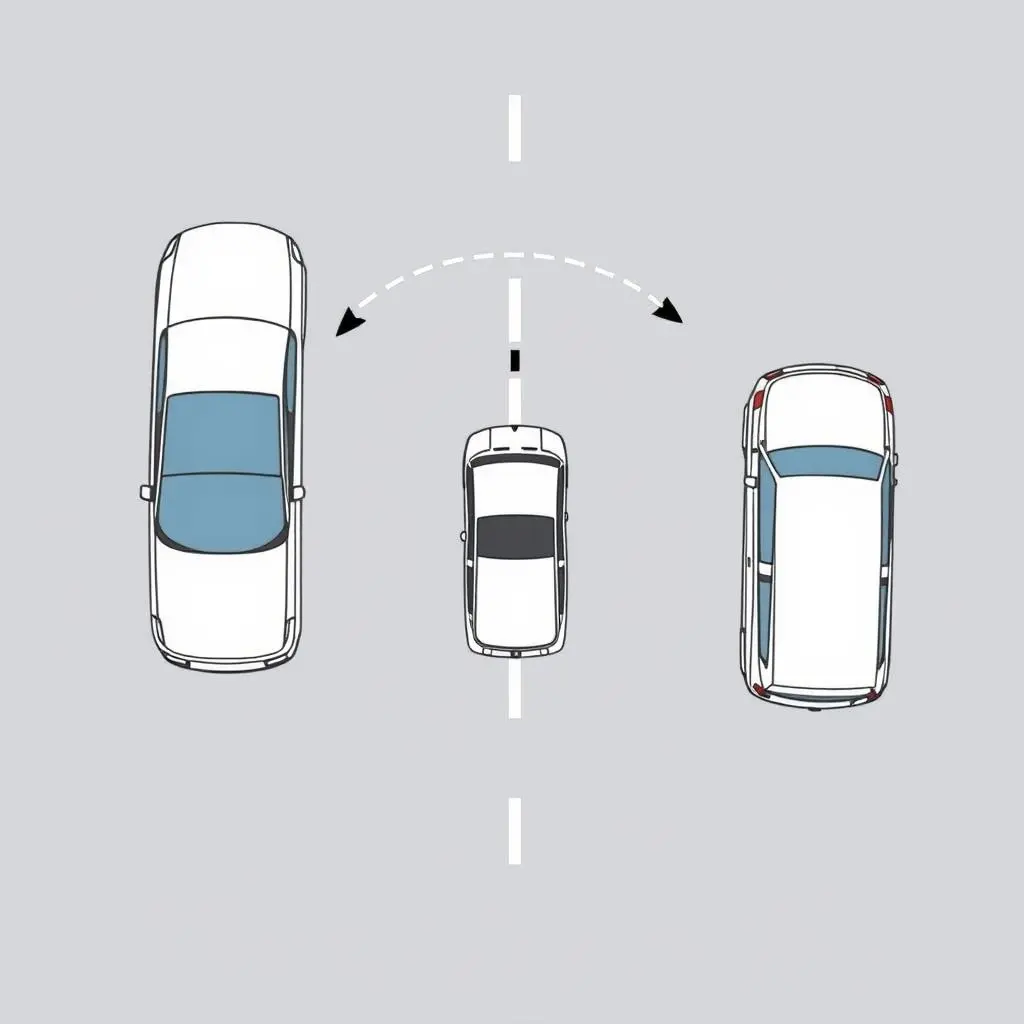
The system guides the car, often initiating the maneuver by backing into the space at a sharp angle. It continuously monitors the distance to the cars in front, behind, and the curb using its sensors. Based on this real-time feedback, the system makes automatic steering adjustments, sometimes reversing further or pulling forward slightly, until the car is snugly and correctly positioned within the parking lines or between the vehicles.
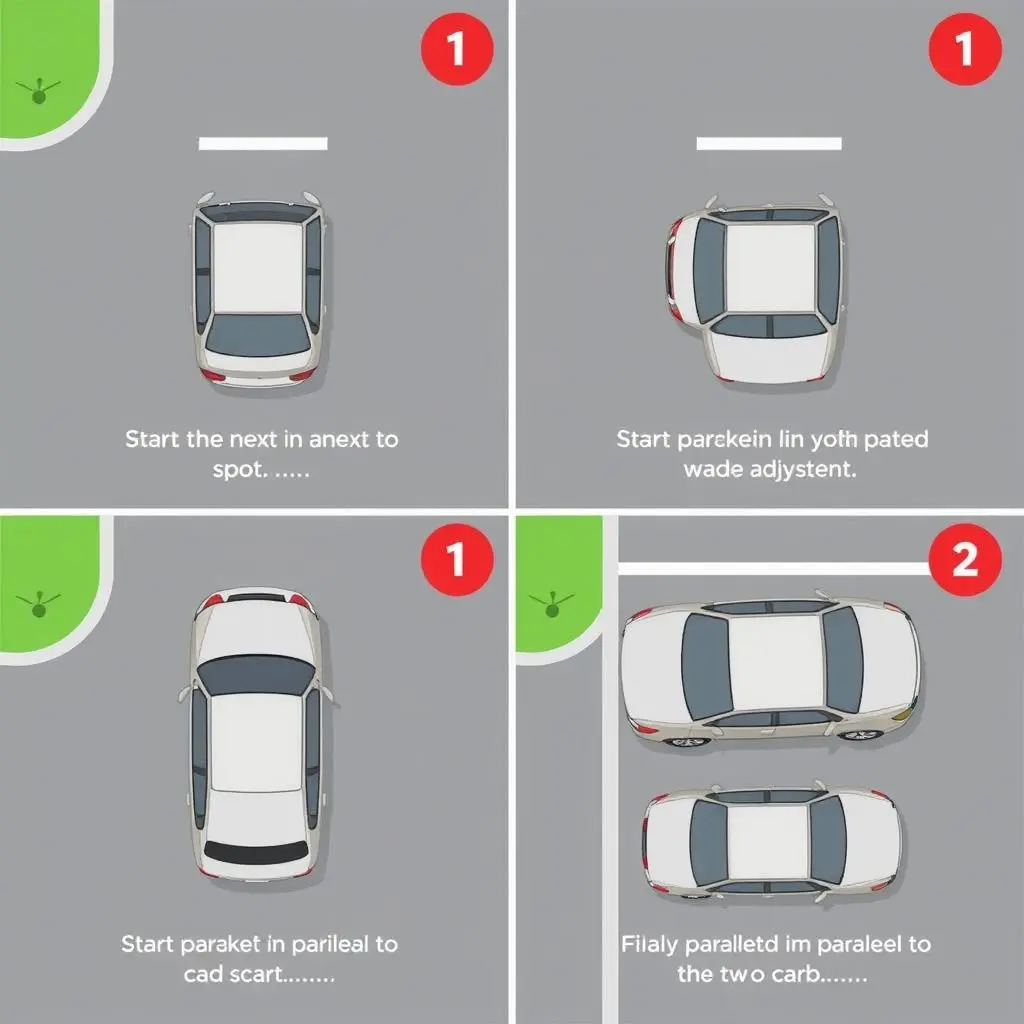
This isn’t just a single back-and-forth movement; it’s a carefully choreographed series of micro-adjustments. The system aims not just to fit the car in but to position it optimally – typically centered in the space and parallel to the curb (or as parallel as the space allows).
Is it Truly Perfect? Limitations and Considerations
While incredibly sophisticated, self-parking systems aren’t infallible magic wands. Their effectiveness can depend on several factors:
- Visibility of Markings/Obstacles: The system relies on clear sensor readings. Heavy rain, snow, or poorly marked parking spots can sometimes confuse it.
- Oddly Shaped Spaces: Spaces that aren’t standard rectangles, or those with unusual obstacles (like low walls or planters the sensors might miss), can pose challenges.
- Moving Objects: While systems are designed to stop for sudden obstacles, unpredictable human or animal movement around the car during the maneuver can sometimes require driver intervention.
- System Variations: Different manufacturers use different sensor suites and algorithms, leading to variations in speed, accuracy, and reliability. Some systems are better than others.
- Driver Supervision: Most systems require the driver to remain in the driver’s seat and be ready to take over if needed. You’re not supposed to leave the car to park itself unattended.
Think of it as a highly competent assistant, not a fully autonomous robot (at least not yet!).
Frequently Asked Questions About Self-Parking
Q: Is self-parking safe?
A: Yes, self-parking systems are designed with safety in mind. They use multiple sensors to detect obstacles and can typically stop instantly if something unexpected is detected in their path during the maneuver. However, the driver is still expected to supervise the process and be ready to brake or take control if necessary.
Q: Can self-parking systems damage my car or other cars?
A: The systems are programmed to maintain a safe distance from surrounding objects. While glitches or sensor issues are theoretically possible (as with any technology), they are rare. Proper use involves ensuring the sensors are clean and undamaged and that the driver remains attentive. Ultimately, if damage were to occur due to a system malfunction under proper use, it would be a matter for the manufacturer’s warranty or liability.
Q: Do self-parking cars work in tight spaces?
A: They work best in spaces that are adequately sized – typically requiring a length about 1.1 to 1.5 times the length of the vehicle itself. While they are designed for precision, extremely tight spaces pushing the limits of the car’s turning radius might still be difficult or impossible for the system, though often they can manage tighter spots than an average human driver might attempt.
Q: Can I override the self-parking system?
A: Absolutely. Most self-parking systems are designed so that the driver can take back control at any point by grabbing the steering wheel, pressing the brake firmly, or sometimes pressing a cancel button. The system is meant to assist, not to remove the driver from the loop entirely.
Q: Does self-parking only work for parallel parking?
A: Many modern systems also support perpendicular parking (backing into a spot in a parking lot). Some advanced systems can even handle angled parking or ‘parking out’ – automatically maneuvering the car out of a tight parallel spot.
The Future is Parking Itself
What started as a novelty in luxury vehicles has rapidly become a more common feature across various car segments. The technology continues to evolve, integrating more sophisticated sensors, more intelligent algorithms, and moving towards systems that require even less driver input. While they may not completely eliminate the need for human parking skills just yet, self-parking cars represent a significant step forward, transforming a potentially frustrating task into a smooth, calculated operation – truly a piece of digital choreography.
Related posts:
 How Do Self-Driving Cars Perceive the World? (LiDAR vs Cameras)
How Do Self-Driving Cars Perceive the World? (LiDAR vs Cameras)
 Lost and Found: How GPS Triangulation Pinpoints Your Spot
Lost and Found: How GPS Triangulation Pinpoints Your Spot
 What If Our Cars Ran on a Miniature Star? The Dream of Fusion Power on Wheels
What If Our Cars Ran on a Miniature Star? The Dream of Fusion Power on Wheels
 Flying Cars: Sky-High Dreams vs. Grounded Reality
Flying Cars: Sky-High Dreams vs. Grounded Reality
 Recognizing AI-Generated Text: Can Your Critical Eye Spot It?
Recognizing AI-Generated Text: Can Your Critical Eye Spot It?